La tecnología moderna de atornillado se utiliza en la industria eléctrica, maderera y aeroespacial, así como en el sector de la electromovilidad, la ingeniería mecánica, las telecomunicaciones y en los dispositivos domésticos y médicos. El sector de la automoción y la carrocería es el mayor ámbito de aplicación para WEBER.
https://de.weberdev.eu/schraubtechnik-fuer-automotive-und-karosseriebau/
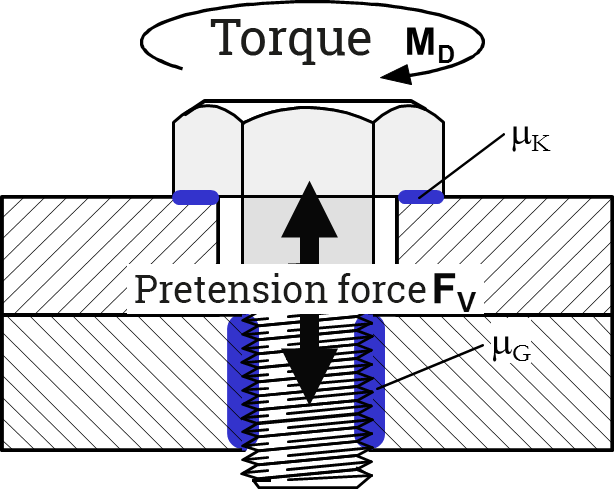
En la producción de carrocerías de la industria automovilística, el objetivo es la máxima seguridad y la unión o separación permanente de las piezas individuales. En este ámbito, se prefiere una tecnología de atornillado a cargo de profesionales porque los requisitos de material son altos. Los elementos de unión necesarios deben ser ligeros, resistentes y rentables. En el pasado, se utilizaba la soldadura. Pero la tecnología moderna es diferente. Hoy día, los profesionales utilizan una tecnología de atornillado automatizada, muy flexible, segura y con una tasa de error casi nula. Además, los productos son más fáciles de desmontar y reciclar al final de su vida útil. ¿Y cómo funciona todo esto? Nuestra guía le ofrece las respuestas.